Revolutionizing Wear and Tear Simulations: Cutting Computation Time by 4000x with Embedded FMI
- Alex Magdanz
- Jul 5, 2024
- 3 min read

Summary of Presentation from the 2016 ESI SimulationX User Forum
Conference Paper by Susanne Walther, Karsten Todtermuschke, Dr. Uwe Schnabel, ESI ITI GmbH; and Matthias Thiele, TU Dresden, Germany
The paper from the 2016 SimulationX Conference, titled "Embedded simulation via FMI for wear and tear processes," presented a new modeling approach aimed at reducing computation time for simulations involving wear and tear in mechatronic systems. This approach, developed within the ROMESA project, utilizes the Functional Mock-up Interface (FMI) for co-simulation in an innovative way to address models with variables overlain by negligible oscillations.
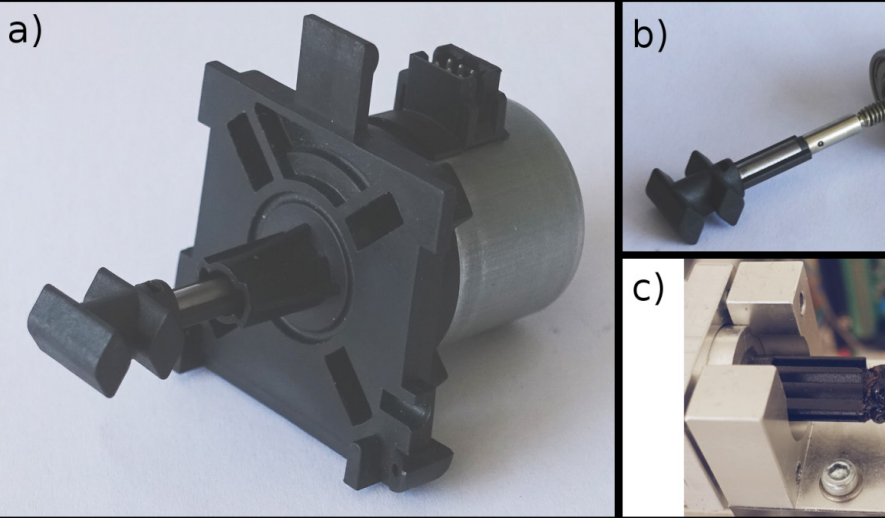
"A linear stepper motor based on a screw drive.
a) Complete assembly of the motor to be used as adjusting drive.
b) Dismantled screw drive with ball bearing. These two components are susceptible to mechanical wear.
c) Screw drive without motor in a setup for lifetime testing. The manufacturer of this and other mechatronic components is interested in the simulation of these lifetime tests in order to save time during the development of new components."
Overview of the Approach
The main objective is to simulate the wear and tear of a linear stepper motor's screw drive over several months. Traditional simulation methods require extensive computation time due to the small time steps needed for high-frequency oscillations. The proposed method, "Embedded Simulation via FMI," mitigates this by separating the computation into two solvers: an inner solver for high frequencies and an outer solver for slowly varying quantities. This separation allows for significantly larger time steps, reducing the computation time from 2.5 days to 1 minute, a factor of 4000.

"SimulationX model of the linear stepper motor. The components affected by wear are the screwDrive due to abraded volume and the ballBearing due to an increasing backlash."
Implementation Details
Model and Solvers: The linear stepper motor model undergoes cycles of 20 seconds, which includes negligible oscillations. The method applies two solvers: the inner solver handles high-frequency oscillations, while the outer solver manages long-term dynamics.
FMI for Co-Simulation: FMI is traditionally used to couple simulation tools and subsystem models. This method extends its use by embedding a simulation within another simulation, where the inner model is exported with its solver as a Functional Mock-up Unit (FMU). The outer solver controls the computation, calling the inner solver as needed.
Integration and Extrapolation: The new function added to SimulationX allows complete computation of the inner model with a single function call, including all necessary initializations and parameter settings. The inner model simulates one cycle and returns output variables to the outer solver, enabling efficient extrapolation and integration.


"The upper figure illustrates the usage of FMI in the way it was designed for. Two models are connected and are simulated in parallel independently of each other. They exchange variables at previously defined communication times. The Embedded Simulation via FMI is shown in the lower figure. In contrast to the Co-Simulation only the outer solver runs for the whole simulation. It calls the inner solver at each of its time steps but not at predefined communication steps. The inner solver simulates for the duration of one cycle only. It returns output variables to the outer solver afterwards. Since the time steps of the outer solver are expected to be much longer than Tcycle, the outer solver continues its calculation at ti, but not at ti+TCycle."
Validation and Results
Two simulations were conducted: one using the new approach and the other with the original model. The results showed a maximum difference of less than 0.05% for a 60-day simulation, validating the accuracy of the new method. The wear coefficient, adjusted for experimental alignment, indicated minimal wear within the simulation period. For thorough validation, the wear coefficient was increased to accelerate wear and reveal dynamics, resulting in a maximum difference of less than 0.1%.

Comparison of Embedded Simulation with FMI (pluses, red) and original model (solid line, green) with accelerated effect of wear and tear. The wear behavior switches between regions after some hours, where Vv = 10-3mm3 , and after 42 d, where Vv = 0.1mm3 , respectively. These behavior changes are passed to the outer solver via triggering events. In the second region, where the wear coefficient stays constant, the time step reaches its maximal value of 5 d.
Potential and Future Work
The prototype implementation of the "Embedded Simulation via FMI" demonstrates significant potential in reducing simulation time while maintaining accuracy. Future developments aim to automate the generation of this approach via code export in SimulationX. The method is promising for wear and aging simulations and other applications like predictive process control, offering a substantial enhancement in simulation efficiency within the ROMESA project and beyond.
References
1. BMBF, "Projektblatt_ROMESA.pdf"
2. Functional Mock-up Interface, https://www.fmi-standard.org/
3. G. W. Stachowiak, "Wear: materials, mechanisms and practice," John Wiley & Sons, 2006
If interested in additional information, please contact us for the full proceedings of the 2016 ESI SimulationX User Forum.

Comments